Home
Publications
People
News
Teaching
Join Us
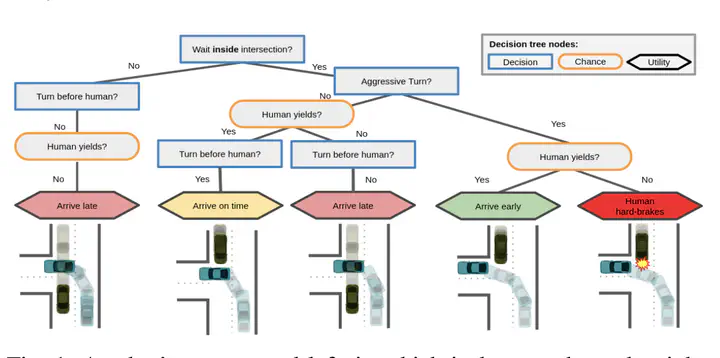
Contingencies from observations: Tractable contingency planning with learned behavior models
Nicholas Rhinehart
,
Jeff He
,
Charles Packer
,
Matthew a Wright
,
Rowan McAllister
,
Joseph E Gonzalez
,
Sergey Levine
January 2021
PDF
Cite
Type
Conference paper
Venue
IEEE International Conference on Robotics and Automation
Year
2021
Autonomous Driving
Computer Vision
Forecasting
Imitation Learning
Machine Learning
Planning
Robotics
Nicholas Rhinehart
Assistant Professor
PI of LEAF Lab
Cite
×