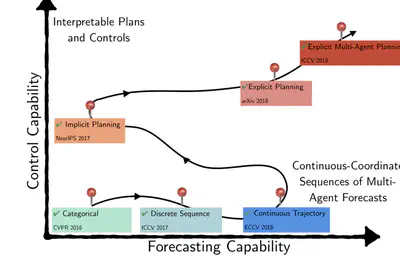
Planning
All Publication Topics
Autonomous Driving
Autonomous Exploration
Benchmarks
Compression
Computer Vision
First-Person Video
Forecasting
Generative Models
Imitation Learning
Intrinsic Control
Machine Learning
Manipulation
Offroad Navigation
Paper Award
Planning
Reinforcement Learning
Reward Learning
Robotics
Is anyone there? learning a planner contingent on perceptual uncertainty.
Conference on Robot Learning, (CoRL), 2023.
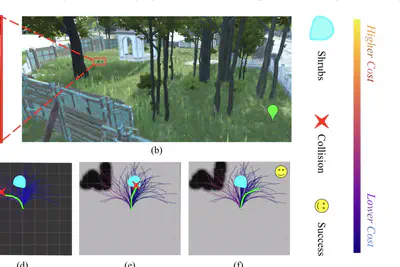
Hybrid imitative planning with geometric and predictive costs in off-road environments.
International Conference on Robotics and Automation, (ICRA), 2022.
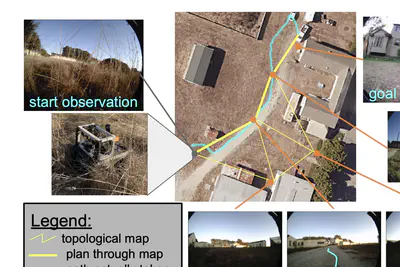
Ving: Learning open-world navigation with visual goals.
IEEE International Conference on Robotics and Automation, (ICRA), 2021.
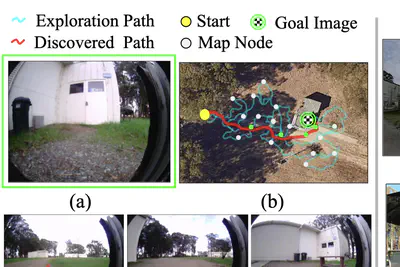
Rapid exploration for open-world navigation with latent goal models.
Conference on Robot Learning, (CoRL), 2021.
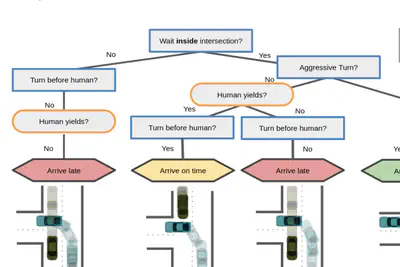
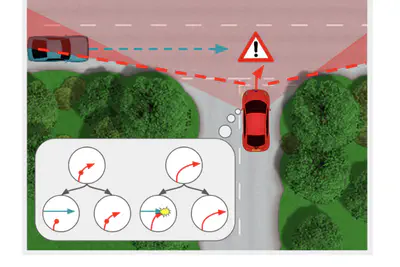
Contingencies from observations: Tractable contingency planning with learned behavior models.
IEEE International Conference on Robotics and Automation, (ICRA), 2021.
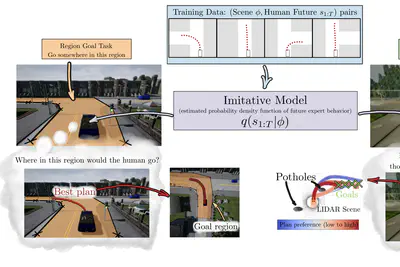
Deep Imitative Models for Flexible Inference, Planning, and Control.
International Conference on Learning Representations, (ICLR), 2020.
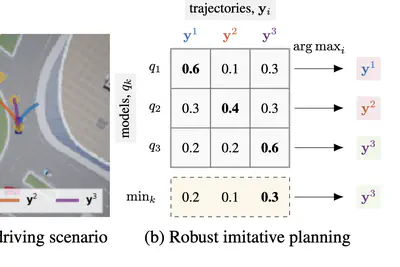
Can autonomous vehicles identify, recover from, and adapt to distribution shifts?.
International Conference on Machine Learning, (ICML), 2020.