Generative Models
All Publication Topics
Autonomous Driving
Autonomous Exploration
Benchmarks
Compression
Computer Vision
First-Person Video
Forecasting
Generative Models
Imitation Learning
Intrinsic Control
Machine Learning
Manipulation
Model-Based Control
Offroad Navigation
Paper Award
Reinforcement Learning
Reward Learning
Robotics
Social Navigation

CARFF: Conditional Auto-encoded Radiance Field for 3D Scene Forecasting.
European Conference on Computer Vision, (ECCV), 2024.
Is anyone there? learning a planner contingent on perceptual uncertainty.
Conference on Robot Learning, (CoRL), 2023.

S2Net: Stochastic Sequential Pointcloud Forecasting.
European Conference on Computer Vision, (ECCV), 2022.

Inverting the pose forecasting pipeline with SPF2: Sequential pointcloud forecasting for sequential pose forecasting.
Conference on robot learning, (CoRL), 2021.

Information is power: Intrinsic control via information capture.
Advances in Neural Information Processing Systems, (NeurIPS), 2021.

Parrot: Data-driven behavioral priors for reinforcement learning.
International Conference on Learning Representations, (ICLR), 2020.
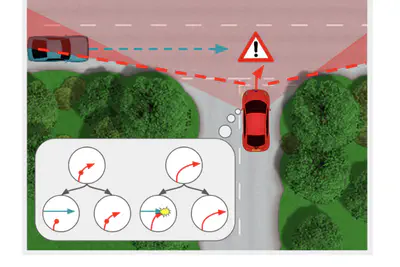
Deep Imitative Models for Flexible Inference, Planning, and Control.
International Conference on Learning Representations, (ICLR), 2020.

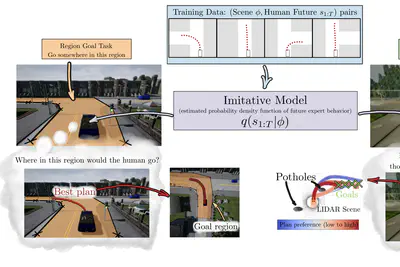
PRECOG: PREdiction Conditioned On Goals in Visual Multi-Agent Settings.
Proceedings of the IEEE International Conference on Computer Vision, (ICCV), 2019.
Best Paper Award @ ICML 2019 Workshop on AI for Autonomous Driving
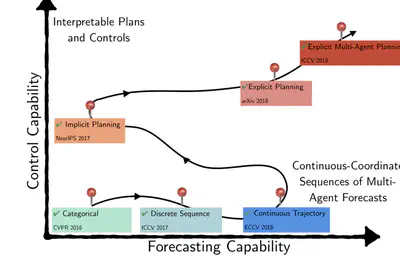

Generative Hybrid Representations for Activity Forecasting with No-Regret Learning.
Conference on Computer Vision and Pattern Recognition, (CVPR), 2019.

R2P2: A Reparameterized Pushforward Policy for Diverse, Precise Generative Path Forecasting.
Proceedings of the European Conference on Computer Vision, (ECCV), 2018.