Home
Publications
People
News
Teaching
Join
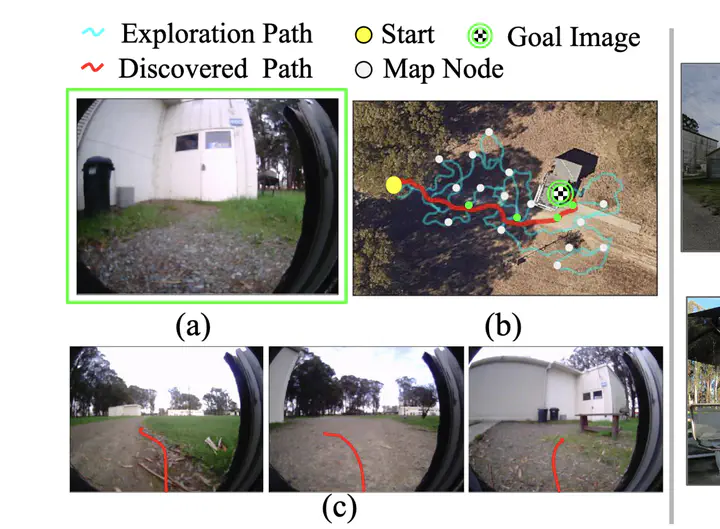
Rapid exploration for open-world navigation with latent goal models
Dhruv Shah
,
Benjamin Eysenbach
,
Gregory Kahn
,
Nicholas Rhinehart
,
Sergey Levine
.
Rapid exploration for open-world navigation with latent goal models
.
Conference on Robot Learning
, (
CoRL
), 2021.
PDF
Cite
Autonomous Exploration
Offroad Navigation
Robotics
Model-Based Control
Type
Conference paper
Venue
Conference on Robot Learning
Year
2021
Nicholas Rhinehart
Assistant Professor
PI of LEAF Lab
Cite
×