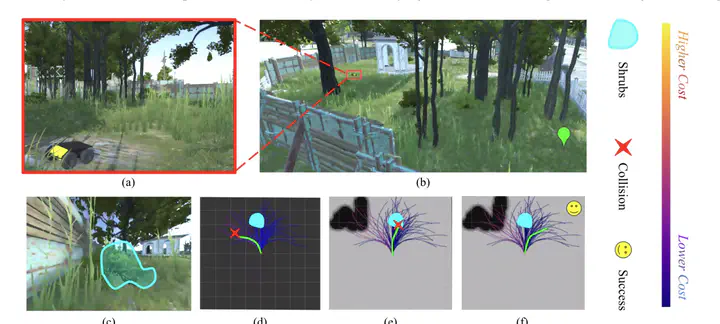
Hybrid imitative planning with geometric and predictive costs in off-road environments
Hybrid imitative planning with geometric and predictive costs in off-road environments.
International Conference on Robotics and Automation, (ICRA), 2022.
Type
Venue
International Conference on Robotics and Automation
Year
2022