Home
Publications
People
News
Teaching
Join Us
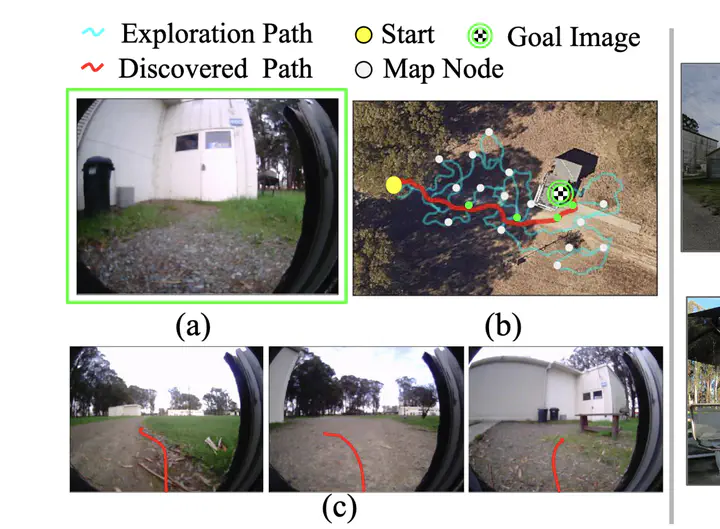
Rapid exploration for open-world navigation with latent goal models
Dhruv Shah
,
Benjamin Eysenbach
,
Gregory Kahn
,
Nicholas Rhinehart
,
Sergey Levine
January 2021
PDF
Cite
Type
Conference paper
Venue
Conference on Robot Learning
Year
2021
Autonomous Exploration
Offroad Navigation
Robotics
Planning
Nicholas Rhinehart
Assistant Professor
PI of LEAF Lab
Cite
×