Home
Publications
People
News
Teaching
Join Us
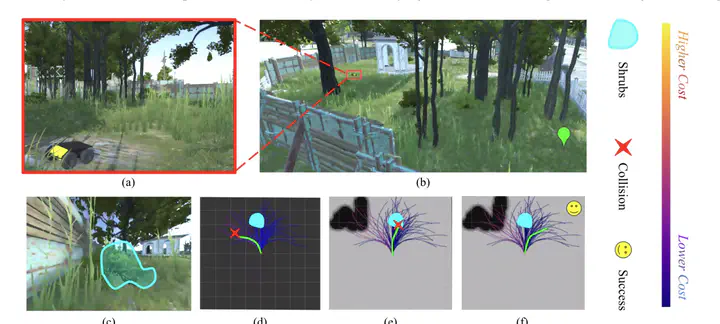
Hybrid imitative planning with geometric and predictive costs in off-road environments
Nitish Dashora
,
Daniel Shin
,
Dhruv Shah
,
Henry Leopold
,
David Fan
,
Ali Agha-Mohammadi
,
Nicholas Rhinehart
,
Sergey Levine
January 2022
PDF
Cite
Type
Conference paper
Venue
International Conference on Robotics and Automation
Year
2022
Imitation Learning
Machine Learning
Planning
Offroad Navigation
Robotics
Nicholas Rhinehart
Assistant Professor
PI of LEAF Lab
Cite
×